
Piano Generale del Traffico Urbano (PGTU) di Prato
Dopo aver redatto il PUMS (strumento strategico di pianificazione della mobilità con validità decennale) approvato nel 2016, TRT è stata incaricata della redazione del Piano Generale del Traffico Urbano (PGTU) della città di Prato.
Il PGTU si configura come piano d’azione del PUMS, dettagliando gli interventi previsti da quest’ultimo nello scenario di riferimento e di piano nel breve periodo. Le attività hanno riguardato:
- la progettazione e la supervisione di una campagna di rilevi dei flussi di traffico presso 12 sezioni e 15 intersezioni urbane;
- l’adattamento ad una scala più dettagliata del modello AIMSUN di simulazione del traffico (già a disposizione dell’Amministrazione Comunale) e la sua calibrazione;
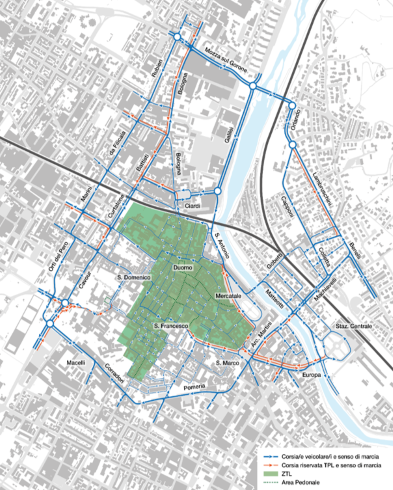
- la costruzione dello Scenario di Riferimento, comprendente gli interventi già decisi e finanziati e dello Scenario di Piano con particolare attenzione alle misure realizzabili nel breve periodo (rete viaria e sua regolamentazione, trasporto pubblico, ciclabilità, politiche di gestione della domanda di mobilità, sistema della sosta, logistica, strumenti tecnologici), coerenti con quanto proposto dal PUMS;
- la valutazione modellistica dello Scenario di Piano nonché la preparazione dei relativi indicatori e output grafici.
Il PGTU è stato adottato e approvato dalla Giunta Comunale con delibera n. 477 del 27/12/2018.
Archivio progetti
Project Description
CLIENTE
Comune di Prato
PERIODO
2016 – 2018
REFERENTE
Ivan Uccelli
uccelli@trt.it